
Wie ist das mit alten Kindheitsträumen? Manche geraten in Vergessenheit und erfüllen sich nie, andere überleben sich vielleicht, wie z.B. der Traum Lokomotivführer zu werden. Aber ganz selten wird so ein Traum doch noch Wirklichkeit nach vielen Jahrzehnten. So wie dieser hier: Ein fischertechnik Professional Computing Bausatz (Artikel-Nr. 30330) von 1988, bestehend aus 888 Teilen. Damit konnte unter anderem ein kompletter Industrieroboter im Kleinformat gebaut werden. Zusätzlich benötigt man noch ein fischertechnik C64-Interface zum Anschluss an selbigen – dann kann es losgehen! Ich muss sagen, es war sehr spannend und herausfordernd sich auf dieses Abenteuer einzulassen …
Interessanterweise konnte ich sogar meine Tochter (16) davon begeistern, mit mir zusammen den Roboterarm aufzubauen. Ich hatte wirklich Glück so einen gut erhaltenen und vollständigen Bausatz sehr günstig zu ergattern. Und ich glaube, meine Tochter und ich waren die ersten, die überhaupt damit ein komplettes Modell gebaut haben – wir mussten sogar noch die Kabel montieren.

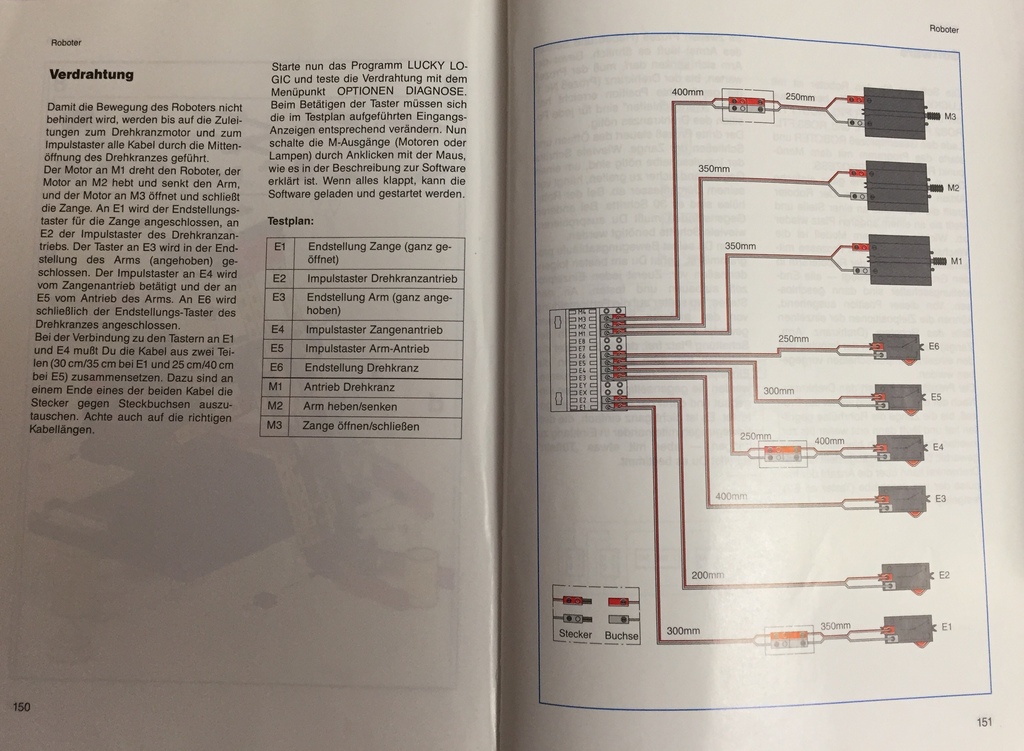
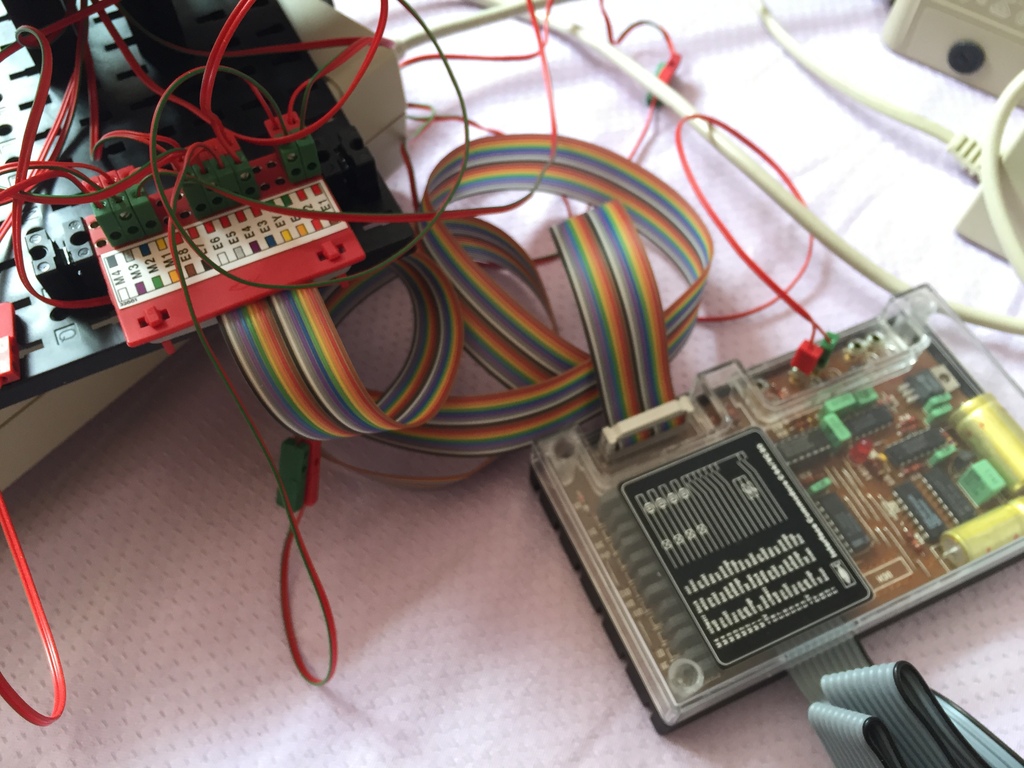
Und das war dann auch schon die erste Herausforderung: Mit einem winzigen Schlitzschraubenzieher und noch winzigeren Schrauben, mussten die Stecker auf die Kabel montiert werden, nachdem man vorher die Kabel auf die richtige Länge geschnitten und alle Enden abisoliert hatte. Puh! Das ist Fleißarbeit 😉
Immer wieder kreisen aber bei dieser filigranen Arbeit die Gedanken um das fertige Modell und man träumt schon davon, den Roboterarm endlich fernsteuern zu können – das motiviert natürlich weiterzumachen!
Alles was dann nämlich folgt, macht dann auch richtig Spaß! Zu sehen, wie langsam der Roboter Stück für Stück wächst und sich dem Endergebnis nähert. Manchmal sind die Explosionszeichnungen in der Aufbauanleitung etwas schwierig zu deuten, aber mit etwas probieren bekommt man es hin. Und manchmal gab sogar die Tochter dem alten Hasen erst den richtigen Hinweis.



Das fischertechnik Grundprogramm, das auf der Diskette mitgeliefert wird, enthält eine Erweiterung des BASIC Befehlssatzes, Steuerbefehle für das ft Interface.
Nachdem dieses Programm geladen und gestartet wurde, kann mit SYS INIT der Roboter initialisiert werden. Mit dem Befehl „SYS M1, RECHTS“ zum Beispiel steuert man den Motor 1 um eine Einheit nach rechts.
Eine solcher Befehl bewegt den Roboterarm in größeren Schritten. Mir ist dann irgendwann aufgefallen, dass man auch sehr viel kleinere Bewegungen realisieren kann, indem man direkt nach dem Steuerbefehl gleich den Befehl „SYS M1,AUS“ setzt. Dadurch wird die Bewegung des Motors direkt wieder beendet. Somit kann man viel kleinere und genauere Bewegungen ausführen.
REM Initialisierung SYS INIT REM Mikrobewegung SYS M1, RECHTS : SYS M1, AUS REM Normale Bewegung SYS M1, RECHTS : FOR P=1TO50 : NEXT P : REM PAUSE
Zum Verständnis, warum ein direkt anschließender AUS-Befehl hinter dem Steuerbefehl eine kleinere Bewegung auslöst: Die Kommunikation vom C64 zum Interface findet immer nur in diese Richtung statt. Eine Erfolgsmeldung zurück ist schlicht nicht vorgesehen. Der „SYS M1, RECHTS“ Befehl schickt also eine rechts Bewegung zum Interface und dieses leitet es an den Motor weiter. Es gibt jedoch keine Rückinformation an das Programm, dass der Befehl erfolgreich ausgeführt wurde („fire-and-forget-Prinzip“). Daher läuft das Programm nach dem RECHTS Befehl auch sofort weiter, ohne die Ausführung des Befehls abzuwarten. Schickt man also direkt einen AUS Befehl hinterher, wird dieser sofort an das Interface geschickt und bewirkt somit, dass der Motor gleich wieder gestoppt wird.
Erstellt man im Programm statt dem AUS eine Warteschleife (FOR P=1TO50), dann hat der Motor genügend Zeit die Bewegung vollständig auszuführen.
